![[OpenCV with Python] 특징점 검출과 매칭 : 특징점 매칭](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdna%2F9nzRi%2FbtrCQw1MTzo%2FAAAAAAAAAAAAAAAAAAAAADLQx4Nrd_WdeGZI0-WpGB_9EcglFOPM5nCdJrsl5uTg%2Fimg.png%3Fcredential%3DyqXZFxpELC7KVnFOS48ylbz2pIh7yKj8%26expires%3D1764514799%26allow_ip%3D%26allow_referer%3D%26signature%3DvWXVfO2NNZEJ%252FvwoFx6%252B0Pnxpgs%253D)
특징점 매칭 - Feature point matching
특징점 매칭은 두 영상에서 추출한 특징점 기술자를 비교하여 서로 유사한 기술자를 찾는 작업이다.
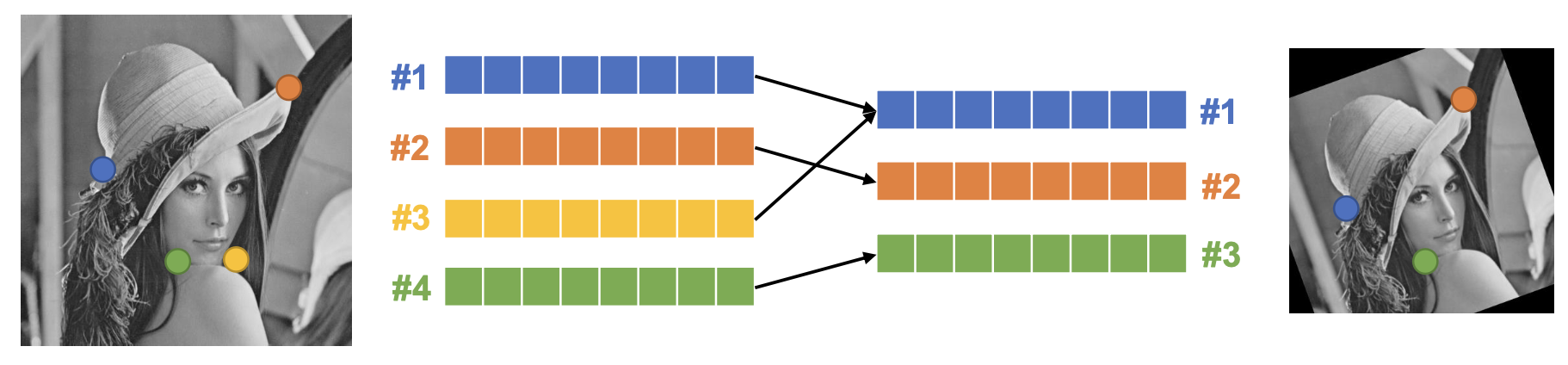
왼쪽은 4개의 기술자, 오른쪽은 3개의 기술자를 계산했으며, 가장 비슷한 것을 찾으므로 4개의 점은 다 매칭이 된다.
위 그림에서 #3이 잘못 매칭된 것을 확인할 수 있는데 알고리즘은 가장 거리가 짧은 곳을 찾아서 매칭을 한다. 따라서 이처럼 잘못 연결된 매칭을 걸러내는 작업을 해야한다.
특징 벡터 유사도 측정 방법
- 실수 특징 벡터 : L2 노름(L2 norm) 사용
- 이진 특징 벡터 : 해밍 거리(hamming distance) 사용
OpenCV 특징점 매칭 클래스
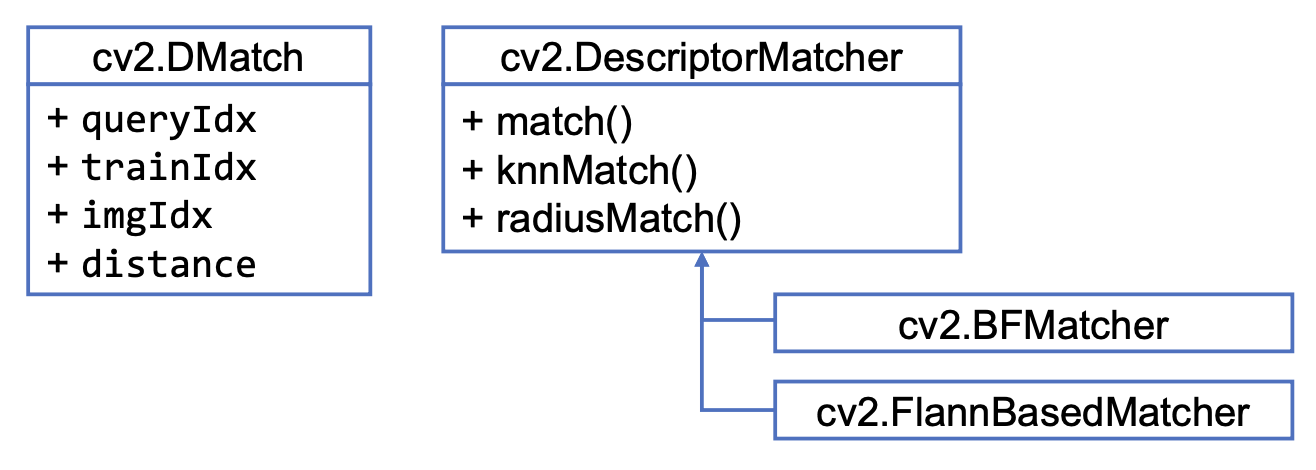
- match는 가장 비슷한거 1개를 매칭
- knnMatch는 비슷한거 k개를 매칭
- radiusMatch는 반경을 정해두고 반경에 들어오는 비슷한 것을 다 매칭
실제로 사용할 때는 match, knnMatch, radiusMatch를 상속받은 cv2.BFMatcher or cv2.FlannBasedMatcher를 이용해야 한다.
cv2.BFMatcher는 BF방법, 전수조사를 하는 것으로, 특징점이 많으면 시간이 오래 걸린다.
cv2.FlannBasedMatcher는 특징점이 너무 많은 경우 근사화를 하여 조사하는 방법으로, 완전히 최솟값에 매칭을 못할 가능성이 있지만 속도가 빠르다. 내부적으로 KD트리를 이용한다.
특징점 매칭 알고리즘 객체 생성 - cv2.BFMatcher_create
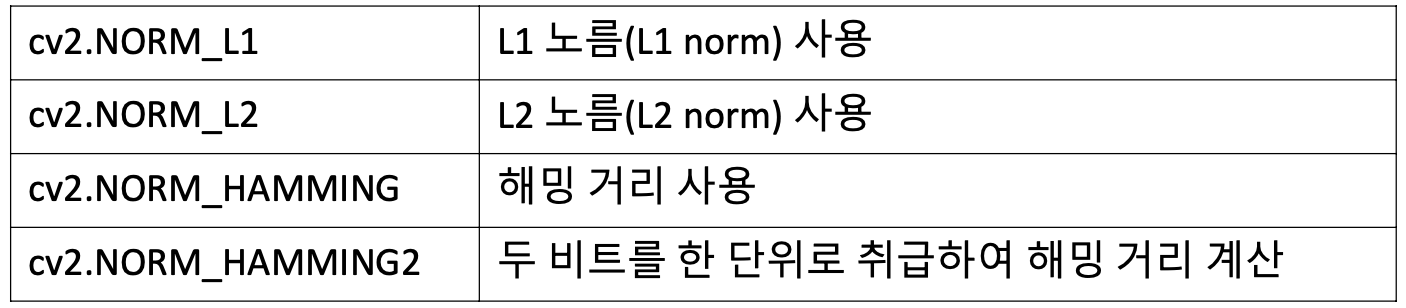
retval = cv2.BFMatcher_create(, normType=None, crossCheck=None)- normType: 특징점 기술자 거리 계산 방식 지정. 기본값은 cv2.NORM_L2.
- crossCheck: 이 값이 True이면 양방향 매칭 결과가 같은 경우만 반환함. 기본값은 False.
실수 기술자, 이진 기술자를 쓰는 알고리즘을 구분하여 normType인자를 지정해줘야 한다.
특징점 검출 알고리즘 객체 생성 - cv2.DescriptorMatcher.match, cv2.DescriptorMatcher.knnmatch
matches = cv2.DescriptorMatcher.match(queryDescriptors,
trainDescriptors,
mask=None)- queryDescriptors: (기준 영상 특징점) 질의 기술자 행렬
- trainDescriptors: (대상 영상 특징점) 학습 기술자 행렬
- mask: 매칭 진행 여부를 지정하는 행렬 마스크.
- matches: 매칭 결과. cv2.DMatch 객체의 리스트.
matches = cv2.DescriptorMatcher.knnmatch(queryDescriptors,
trainDescriptors,
k,
mask=None,
compactResult=None)- queryDescriptors: (기준 영상 특징점) 질의 기술자 행렬
- trainDescriptors: (대상 영상 특징점) 학습 기술자 행렬
- k: 질의 기술자에 대해 검출할 매칭 개수
- mask: 매칭 수행 여부를 지정하는 행렬 마스크
- compactResult: mask가 None이 아닐 때 사용되는 파라미터.
기본값은 False이며, 이 경우 결과 matches는 기준 영상 특징점과 같은 크기를 가짐. - matches: 매칭 결과. cv2.DMatch 객체의 리스트의 리스트
특징점 매칭 결과 영상 생성 - cv2.drawMatches
outImage = cv2.drawMatches(img1,
keypoints1,
img2,
keypoints2,
matches1to2,
outImg,
matchColor=None,
singlePointColor=None,
matchesMask=None,
flags=None)- img1, keypoints1: 기준 영상과 기준 영상에서 추출한 특징점 정보
- img2, keypoints2: 대상 영상과 대상 영상에서 추출한 특징점 정보
- matches1to2: 매칭 정보. cv2.DMatch의 리스트.
- outImg: 출력 영상 (None)
- matchColor: 매칭된 특징점과 직선 색상, 랜덤한 색상
- singlePointColor: 매칭되지 않은 특징점 색상
- matchesMask: 매칭 정보를 선택하여 그릴 때 사용할 마스크
- flags: 매칭 정보 그리기 방법. 기본값은 cv2.DRAW_MATCHES_FLAGS_DEFAULT.
특징점 매칭 예제
황선규 박사님 github홈페이지 sunkyoo.github.io/opencv4cvml/
import sys
import numpy as np
import cv2
# 영상 불러오기
src1 = cv2.imread('graf1.png', cv2.IMREAD_GRAYSCALE)
src2 = cv2.imread('graf3.png', cv2.IMREAD_GRAYSCALE)
if src1 is None or src2 is None:
print('Image load failed!')
sys.exit()
# 특징점 알고리즘 객체 생성 (KAZE, AKAZE, ORB 등)
feature = cv2.KAZE_create()
#feature = cv2.AKAZE_create()
#feature = cv2.ORB_create()
# 특징점 검출 및 기술자 계산
kp1, desc1 = feature.detectAndCompute(src1, None)
kp2, desc2 = feature.detectAndCompute(src2, None)
# 특징점 매칭
matcher = cv2.BFMatcher_create()
#matcher = cv2.BFMatcher_create(cv2.NORM_HAMMING)
matches = matcher.match(desc1, desc2)
print('# of kp1:', len(kp1))
print('# of kp2:', len(kp2))
print('# of matches:', len(matches))
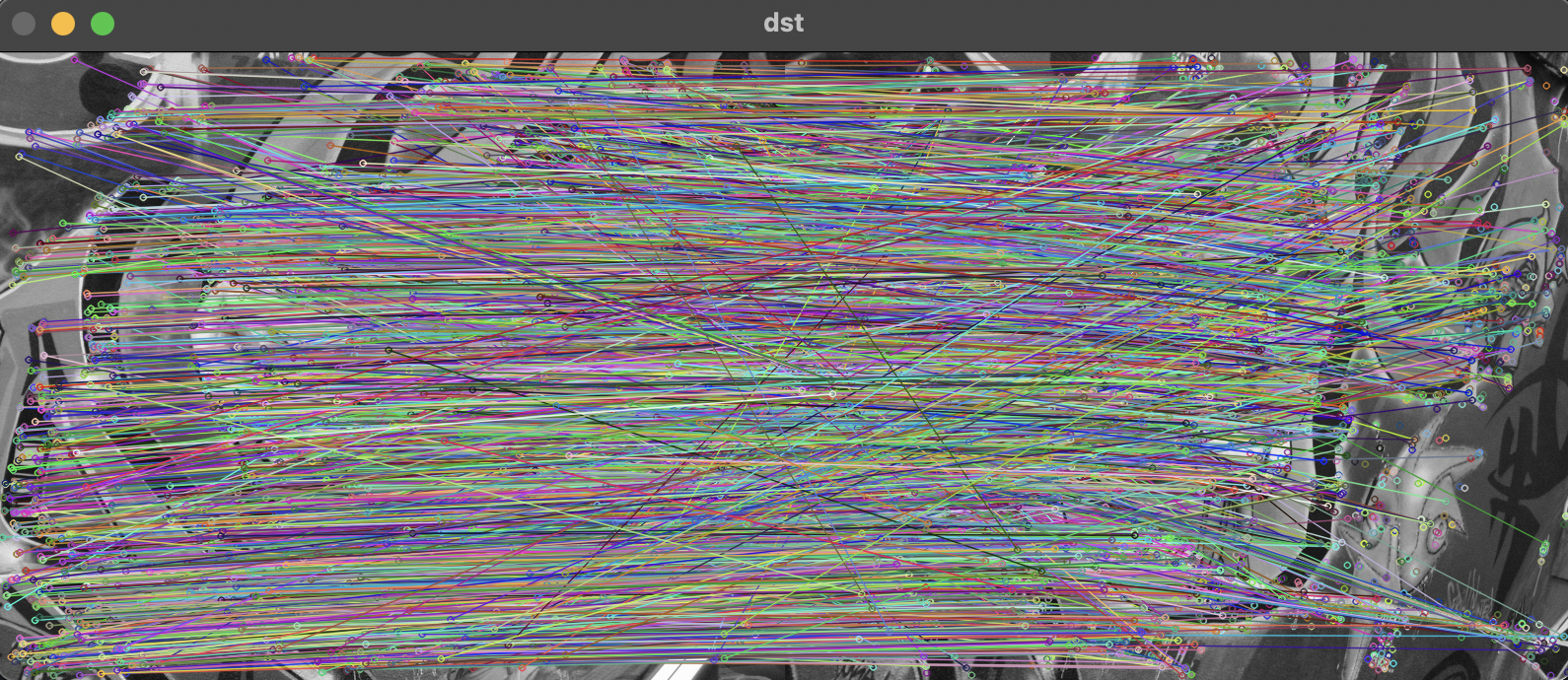
# 특징점 매칭 결과 영상 생성
dst = cv2.drawMatches(src1, kp1, src2, kp2, matches, None)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()
'OpenCV' 카테고리의 다른 글
| [OpenCV with Python] 특징점 검출과 매칭 : 특징점 기술 (0) | 2022.02.05 |
|---|---|
| [OpenCV with Python] 특징점 검출과 매칭 : 특징점 검출 (0) | 2022.02.05 |
| [OpenCV with Python] 특징점 검출과 매칭 : 코너 검출 (0) | 2022.02.05 |
| [OpenCV with Python] 영상 분할과 객체 검출 : HOG 알고리즘 - 보행자 검출 (0) | 2022.02.05 |
| [OpenCV with Python] 영상 분할과 객체 검출 : 캐스케이드 분류기 - 얼굴 검출 (0) | 2022.02.05 |